

 联系我们
联系我们

本文以FANUC机器人R-2000i系列为例。
对R-2000i机器人进行更换本体电缆操作,该型号的本体电缆分为动力电缆和编码器电缆,更换的方法类似。
使用工具清单:
内六角扳手一套、斜口钳、十字螺丝刀,一字螺丝刀、鱼嘴钳、退针器、尼龙扎带若干。
作业中安全用品一览:
安全帽、安全挂锁、手套、安全鞋
拆卸步骤 :
1.将机器人置于所有轴0度的位置(特殊情况也可以置于其他姿态),做好MC备份和镜像备份,然后断开控制柜的电源

2.从机器人底座的配线板拆除控制柜侧的电缆

3.将配线板拆出



6.将J1底座的内部接地端子拆除

7.将本体电缆插头完全分离

8.拆除J1-J2轴编码器插头盖板,然后各轴拆除编码器插头。(拔除编码器插头会导致零位,在更换电机,编码器,减速机,电缆以外的情况下,请勿拆除编码器插头)

9.拆除电缆各轴的动力接头


11.拆除J2轴基座上的盖板

12.拆除J1轴上侧夹紧电缆的盖板

13.拆除J1轴基座内的板,拆除固定电缆夹的螺栓


15.拆除J2轴侧板的固定螺栓

16.拆除J2轴机械臂的盖板
17.拆除电缆的夹紧盖板

18.拆除电缆的防护布

19.拆除J3轴外壳的正面配线板

20.拆除J3轴外壳的左侧盖板1

21.拆除拆除J3轴外壳的左侧盖板2

22.拆除J3轴外壳右侧走线板

23.将J3-J6轴电缆穿过铸孔,并将其拉到正面侧来

然后切断束紧着计划更换电缆的尼龙扎带,从而拆除电缆。
24.将电缆用尼龙扎带束紧后,用螺栓将电缆固定在J2轴机臂上。

25.将盖板安装到J2机臂上。

26.新电缆在需要固定并扎紧的部位有黄色胶带标记,按照标记固定并束紧扎带,如果绑的过后或者过前会导致之后的走线不顺畅。

27.用扎带将电缆束紧,将J1轴的上侧盖板固定在J2轴基座上。

28.安装好侧边的盖板。
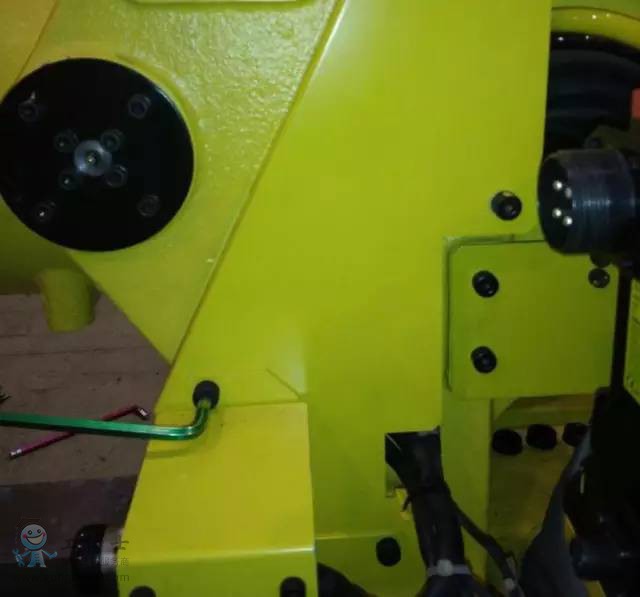
29.将电缆穿过平衡缸下侧,注意电缆的修整,避免电缆与平衡缸相互干涉。

30.将电缆从J1轴管孔穿过。

31.将其拉到J1轴基座后侧,在线夹处用尼龙扎带将电缆固定好。

32.如果是更换本体编码器电缆,需要用退针器将30,37号针脚的短接插头(超程信号)退出,装到新的电缆当中。

33.将哈丁头固定在配线板上,将地线接好,电池盒电缆接好(注意正负极,不要装反)。

34.将J3-J6轴电机插头从J3轴外壳侧穿过其中的铸孔。

35.将J3-J6轴电缆固定在安装板。

36.将J3轴外壳的各个盖板安装好。

37.将各轴的电机编码器,刹车,动力接头连接好。安装好J1-J2轴的编码器保护板。


*后接通电源,重新校准机器人零位,检查机器人状态是否正常
了解更多:发那科机器人配件
